はじめに
本ドキュメントはMIRSMG4D 標準機の組み立て手順を示したものである
組み立て前の加工
・下段シャーシへの電源ボード固定穴加工 (※既に加工済みのシャーシがほとんどです)
加工済みの下段シャーシは本来上下反転して使用することを考えていたため、電源ボード固定穴が上方向のみに空いている。
前方に開けてある穴の位置を参考に、Φ3.2の穴を4か所開けること。ただし、加工精度に不安がある場合はΦ3.5にすること

Fig.3 MIRSMG4 標準機 追加加工穴
ねじ・スペーサーの準備
標準機組み立てに必要となるねじ・スペーサを以下に示す
| 名称 | 用途 | 長さ[mm] | 個数 | SWの有無 | ナットの有無 |
|---|---|---|---|---|---|
| 5mmキャップボルト | モータマウント固定 | 12 | 8 | 有 | 無 |
| 短支柱固定 | 12 | 8 | 有 | 無 | |
| 長支柱固定 | 12 | 8 | 有 | 無 | |
| 3mmねじ | ギアヘッド・モータマウント接続 | 15 | 8 | 有 | 無 | モータ軸Dカット固定用ネジ | 10 | 2 | 無 | 無 |
| 駆動用バッテリーホルダ固定 | 15 | 8 | 無 | 有 | |
| 制御用バッテリーホルダ固定 | 12 | 8 | 無 | 有 | |
| 超音波センサマウント固定 | 12 | 4 | 無 | 有 | |
| 3mmねじ | Arduino固定 | 12 | 4 | 無 | 有 |
| モータドライバ固定 | 12 | 8 | 無 | 有 | |
| 電源ボード固定 | 12 | 4 | 無 | 有 | |
| 2.6mmねじ | Raspberry Pi固定 | 25 | 4 | 無 | 有 |
| キャスター固定 | 10または12 | 6 | 有 | 有 | |
| スペーサ | Arduino固定 | 5 | 4 | ||
| モータドライバ固定 | 5 | 8 | |||
| 電源ボード固定 | 10または15 | 4 | |||
| Raspberry Pi固定 | 10 | 6 | |||
| キャスター固定 | 3 | 6 |
駆動部の組み立て
4.1 タイヤの中に細いタイヤ2本をセットする

Fig.4 タイヤの中にタイヤを入れる(入れにくいので注意すること)
4.3 タイヤホイールにモータ固定パーツを差し込み、タイヤ側からM4ねじで3か所固定する

Fig.5 タイヤとモータ固定パーツ
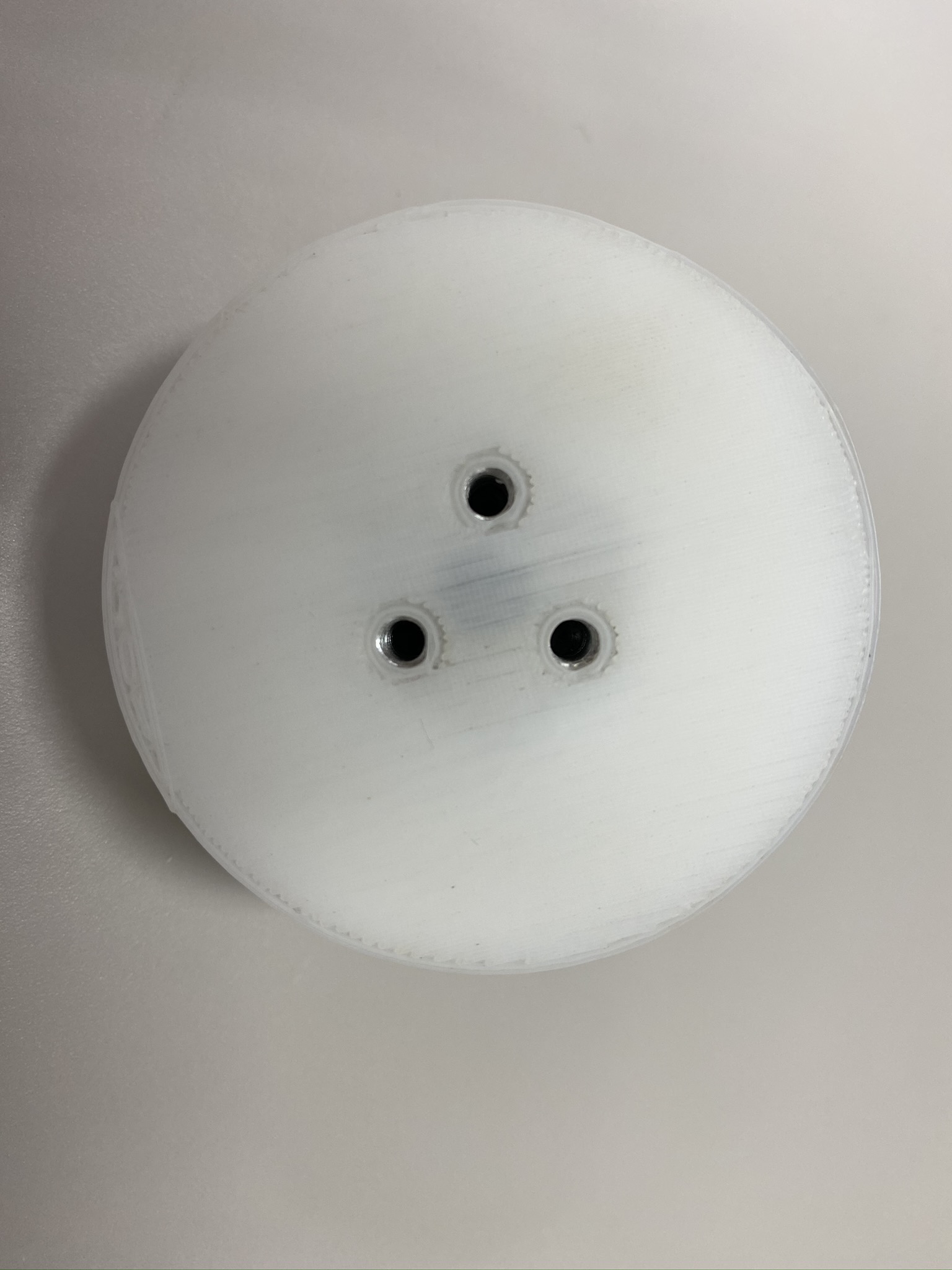
Fig.6 タイヤ面から見た図

Fig.7 モータDカット面と固定するモータ固定パーツのねじ部
4.6 モータシャフトにタイヤホイールを固定する
4.7 モータマウント、モータマウントサポートと下段シャーシをM5のキャップボルトで固定する
4.8 駆動用バッテリーホルダ(4個)をM3ねじとナットで固定する
4.9 ボールキャスター(2個)をM2.6ねじとナットで固定する
キャスターを取り付ける際、スペーサを挟まずに設置すると、床の少しの凹凸でタイヤが浮いてしまうため、前後のキャスターの両方に添 付の写真のように 3mm厚のスペーサを入れること。
![]()
Fig.8 キャスター固定方法
※短支柱:φ15*80のアクリル丸棒 が4本
4.11 長支柱と下段シャーシをM5キャップボルトで固定する
※長支柱:φ15*160のアルミ丸棒 が4本
各種ボードの取り付け
5.1 モータ制御、電源ボードを下段シャーシに取り付ける。
5.1 Raspberry Pi、Arduino を中段シャーシに取り付ける。
ボード取り付けの際は、適当な長さのスペーサとそれに対応する長さのネジを使用すること。
Raspberry Pi の取り付けには M2.6 のネジを使用し、それ以外は M3 のネジを使用する。
制御部の組み立て
6.1 制御用バッテリーホルダ(4個)をM3ねじとナットで固定する
6.2 超音波センサマウント(2個)をM3ねじとナットで固定する
6.3 中段シャーシと短支柱をM5キャップボルトで固定する
ケーブル接続
7.1 制御系ボード、駆動系ボードにケーブルを接続する。
拡張部の組み立て
8.1 上段シャーシと長支柱をM5キャップボルトで固定する
おわりに
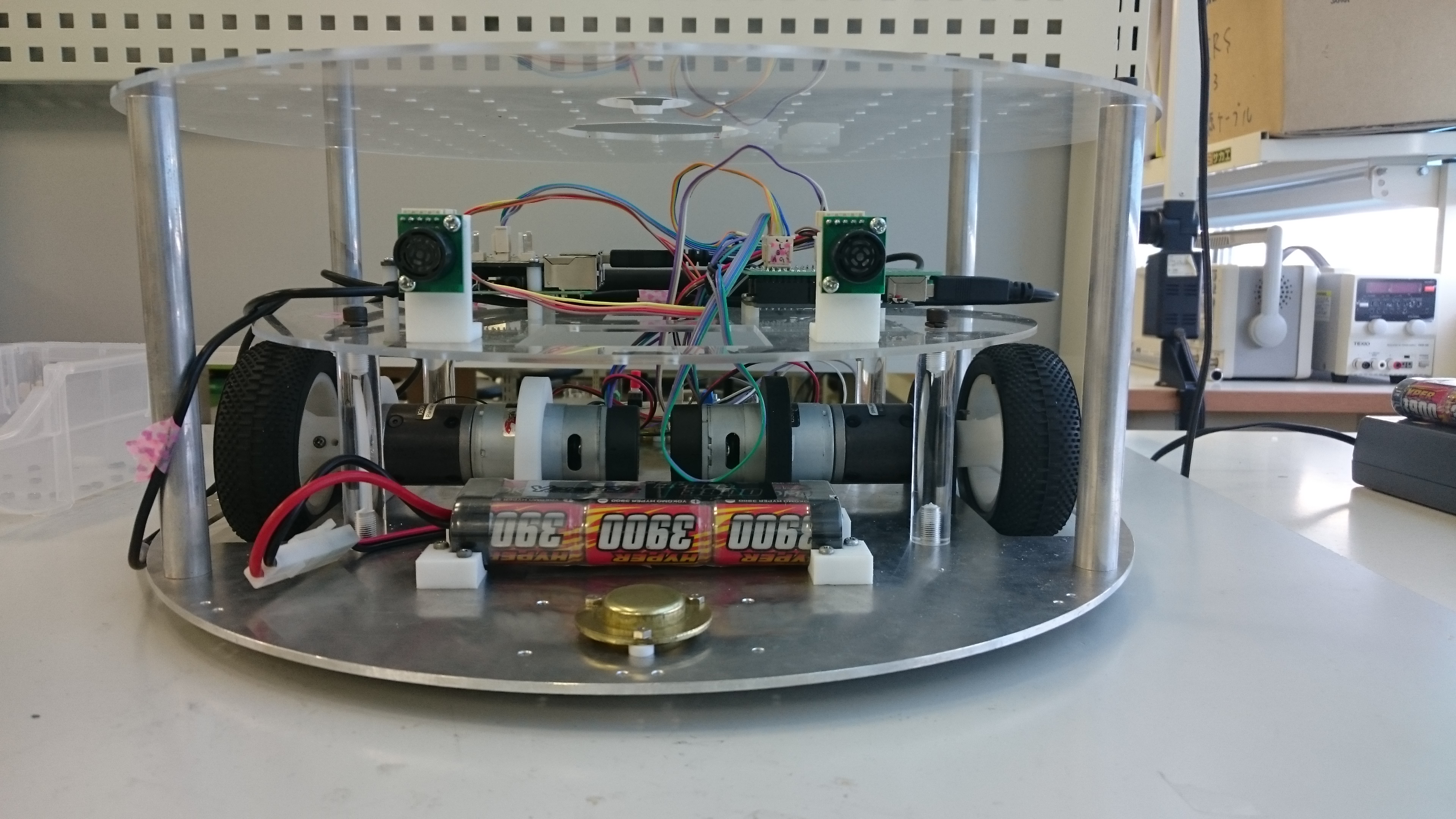
Fig.9 標準機完成図
MIRSMG4D ドキュメント管理台帳